Introduction to robot polishing technology
What is robot polishing technology?
Robot grinding and polishing is actually robot + grinding and polishing, that is, robots are used to replace manual grinding and polishing work.
Mainly used for surface grinding of workpieces, edge and corner deburring, weld grinding, inner cavity hole deburring, orifice and thread processing, etc.
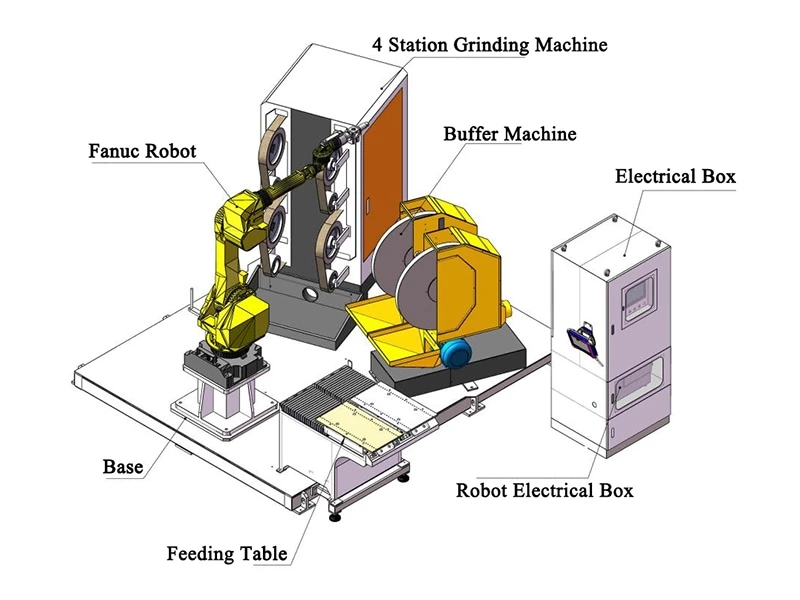
It's core is the polishing and grinding process method + the motion control technology of the robot system, full name is robot automatic surface grinding polishing unit and automatic control system.
How does robot polishing working?
Grinding and polishing and other work tasks that come into touch with the product, it is relatively difficult for robots, which must control the touching force between the manipulator and the environment while controlling the position.
1. Touch method:
① Non-touch: magnetic grinding, spark grinding, etc.
② Yes-touch: flexible control
2. Active flexible control
The feedback information used by the grinding tool system adopts a certain control strategy to actively control the force. Due to the stiffness of the robot end effector, a small displacement deviation may cause damage to the workpiece or equipment.
3. Passive flexible control
Grinding tools rely on some auxiliary flexible mechanisms to naturally comply with external forces when in contact with the environment. They have poor adaptability and are not suitable for finishing.
4. Active and passive flexible control
Combination of active flexible and passive flexible, high precision and high adaptability.