Learn about workpiece-type grinding robots from casting deburring automation cases
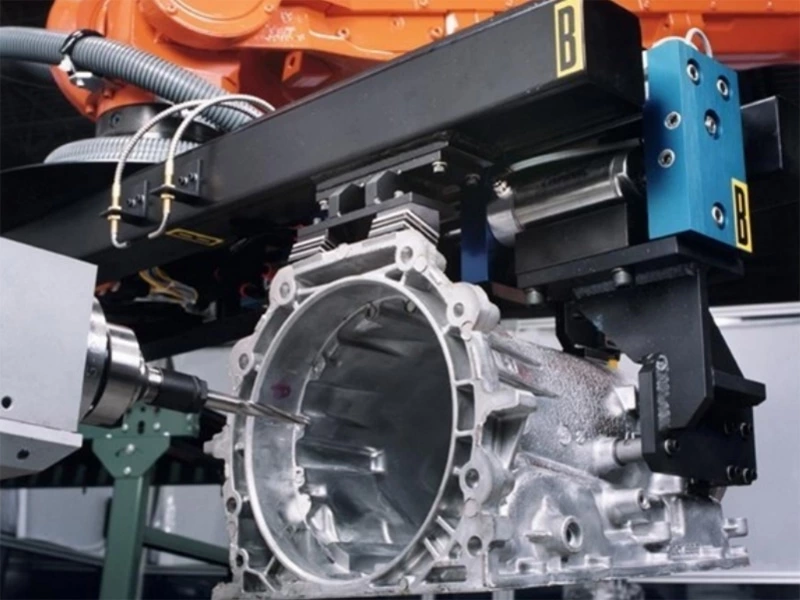
Robot grinding and polishing workstation for grinding and deburring casting cylinder heads

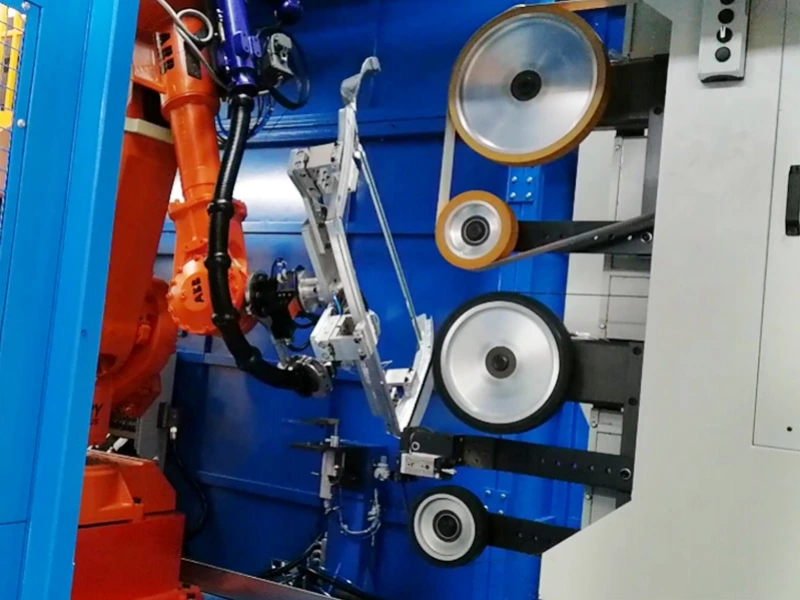
The cast automobile cylinder head grinding and deburring workstation uses a workpiece-type grinding robot. Using a multi-axis machine + belt machine + floating spindle combination.
It's can remove burrs such as holes, edges, lines, and surfaces of parts caused by pressure shock and insufficient clamping force to improve production efficiency, reduce costs, and improve product yields;
Floating deburring is used to deal with irregular-shaped burrs such as edges, corners, and cross holes that are difficult to machine.
Let the floating mechanism and the tool follow the processing of the workpiece burrs, and remove the burrs flexibly like a human hand sliding over the workpiece burrs, effectively avoiding other factors such as robotic arm rigidity, positioning error, workpiece error, etc.
When dealing with irregular burrs, it is easy to break the knife or damage the workpiece due to uneven strength.
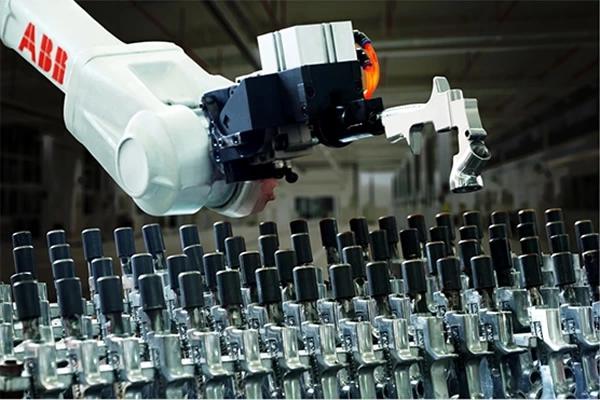
Get to know the polishing robot
Traditional grinding and polishing of hardware/castings takes a long time, has product quality problems, and the sparks, dust and noise generated in the working environment seriously affect people's physical and mental health.
Looking at the development of global industrialization, with the disappearance of the demographic dividend, the reduction of product costs and the requirements for improvement of product quality, the market prospects for polishing robots are broad.
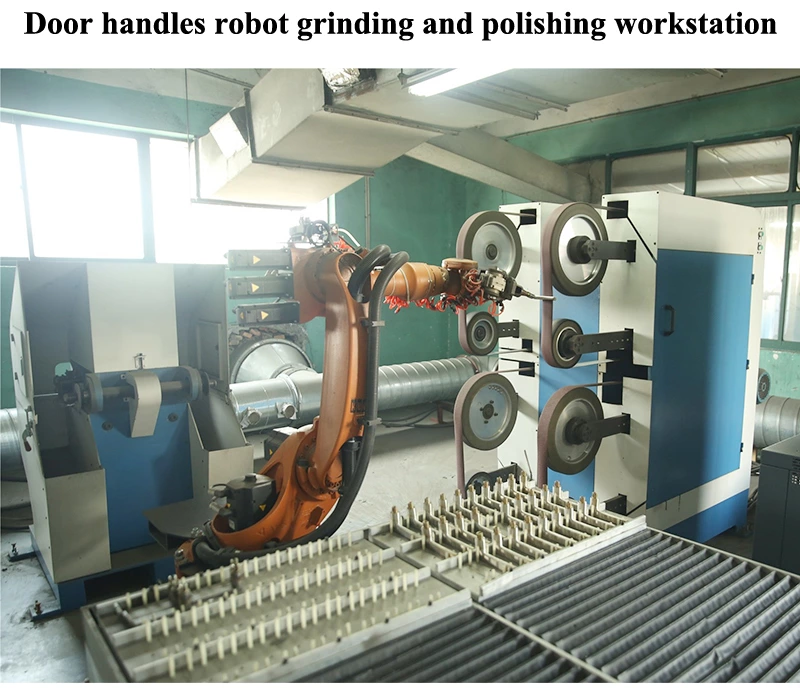
Features of robot grinding and polishing
1. The closed robot workstation isolates high noise and dust from the outside and reduces environmental pollution;
2. Operators do not have direct contact with dangerous processing equipment to avoid work-related injuries;
3. The robot can maintain the consistency of product processing accuracy, which not only ensures reliable quality but also reduces the scrap rate;
4. Robots replace skilled workers, which not only reduces labor costs, but also does not affect delivery time due to the loss of operators;
5. The robot can work continuously 24 hours a day, greatly improving production efficiency;
6. Re-developability, users can perform secondary programming based on different samples, shortening the cycle of product modification and replacement, and reducing corresponding investment in equipment.
What is a workpiece-type grinding robot?
Workpiece-type grinding robot: It is a kind of grinding machine tool equipment that clamps workpieces through robot grippers and delivers the workpieces to various fixed positions.
A grinding robot automated processing system that completes different processes such as grinding and polishing and various polishing processes. Among them, the sanding belt grinding robot is the most typical.
Constitute:
1. Robot body.
2. The grinding equipment equipped with the workpiece-type grinding robot.
3. According to the grinding process requirements, configure a belt sander, grinder, polishing machine, etc. respectively.
4. According to the accuracy requirements, grinding and polishing equipment for rough machining, semi-finishing, finishing and other processes are respectively configured.
5. Fixture for workpiece-type grinding robot.
6. Force control technology for workpiece-type grinding robots.
The workpiece-type polishing robot can be equipped with a force controller according to the polishing needs, and can provide timely feedback on the robot's adhesion through the force sensor.
That is, the adhesion between the workpiece and the grinding equipment during the grinding process, as well as the degree of grinding, prevent the robot from overloading or the workpiece is polished appropriately.
This ensures the consistency of workpiece grinding and prevents waste products.